Pipeline explorer
Full pipeline view
Full pipeline view
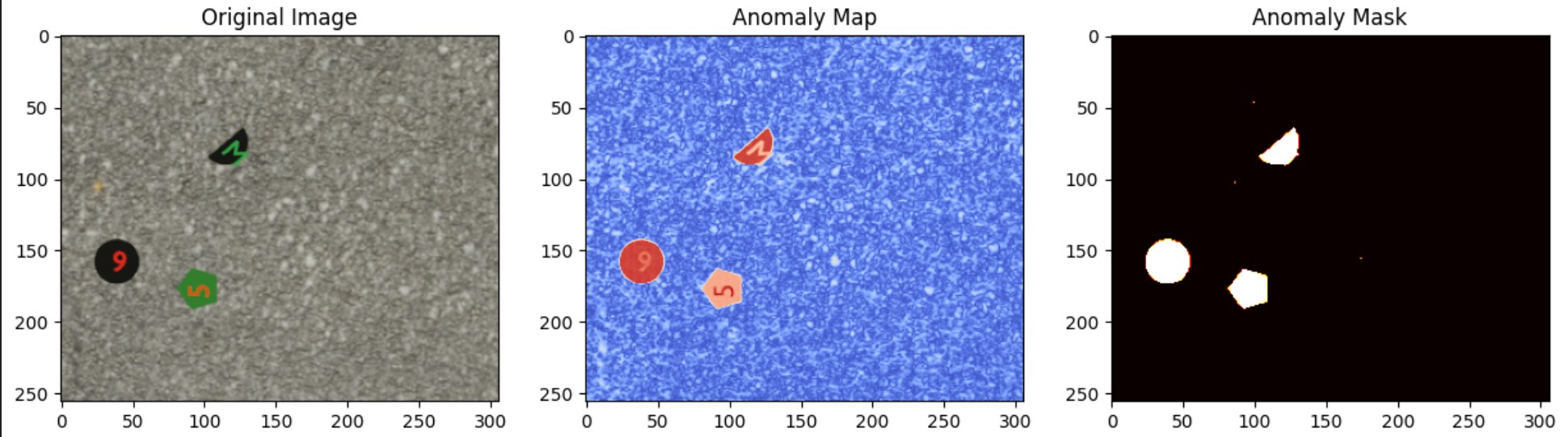
The example summarizes the full logic of the pipeline: the network starts from the original aerial image, produces an anomaly score map, then a thresholded mask that can be post-processed into localized detections.
AE / VAE model view
The model learns to reconstruct what looks normal. Objects or texture changes that are not reconstructed well become residual signal, then a cleaner mask for localization.
AE
x → z → x′
Use reconstruction error as the anomaly score.
VAE
μ, σ → z
Sample the latent code to make the representation smoother.
Post-process
heatmap → boxes
Thresholding and components turn signal into localization.
Pipeline structure
1
Reconstruct
Train an AE / VAE on normal or background-dominated imagery so the model learns to reproduce the expected scene.
2
Score anomalies
Compute a pixel-wise or patch-wise anomaly score from the difference between input and reconstruction.
3
Threshold & clean
Convert the anomaly map into a mask and apply denoising / connected-components logic to isolate likely targets.
4
Localize & crop
Extract bounding boxes and pass crops to a downstream classifier if you want a full detection + classification pipeline.
What I learned
The appealing part of this project is that it uses structure in the problem. When the background is relatively stable, anomaly models can work as a lightweight proposal mechanism.
At the same time, the hard part is noise: VAEs may detect useful anomalies but produce messy heatmaps, so post-processing matters a lot. This is where thresholding, denoising, and connected components become important.